Assisi|bf:
Animal and robot Societies Self-organise and Integrate by Social Interaction
Description
The aim of ASSISI_bf is to develop (1) a fundamental new class of distributed ICT systems, which are bio-hybrid collective adaptive systems (CASs) that consist of two sub-systems: One is a self-organising society of animals; the other one is a society of technical devices. These CASs will solve problems by distributed spatial computation; this heterogeneous system (animals, robots, nodes) will perform collective decision-making and maintain internal homeostasis. (2) We plan to develop a fundamental new method to design CASs by exploiting evolutionary computation on mathematical models that are used to drive the engineered part of the CAS. This way the collective of animals and robots will adapt to environmental changes and will maximize its efficiency and stability. (3) We will develop several novel benchmarks, using the level of acceptance of robots by the animal society as a hard-to-reach criterion. (4) Finally, we will derive a general model for heterogeneous CASs, which will be used to develop new algorithms for other heterogeneous robotic CASs. We address all 3 principles that should be researched for CASs, which are: design, operation and evolution. The project tackles several severe engineering challenges. It has a high potential of impact and foundational character on several communities. On the one hand it has the potential to establish a new field of science, which focuses on self-adapting engineered systems able to integrate themselves into an existing natural society. On the other hand, the proposed long-term impact reaches from establishing important new methods in agriculture, environmental sustainability policies, live stock management, environmental monitoring, bio-hybrid engineering and pharmaceutical industry, as our proposed technology allows fully automated (but non-invasive, non-harmful) experimentation with social animals. By deducting models and algorithms our project can also influence and promote general research of distributed ICT systems.
New European-level research project develops robots that will learn the language of animals
The main goal of ASSISI is to establish a robotic society that is able to develop communication channels to animal societies (honeybees & fish swarms) on its own. These robots will adapt by evolutionary algorithms until they have learned to interact with animals in a desired way.This new technology is aimed to lay new foundations on the way in which humans can interfere with animal societies in order to manage the environment. The researchers expect their work to have impact on agriculture, live stock management and environmental protection. In parallel, the mixed societies of animals and robots will represent a novel kind of bio-hybrid ICT system, as the animals will enrich the capabilities of the machines and vice versa. The research is conducted by six European institutions from Austria, Croatia, France, Germany, Portugal and Switzerland.
SCIENTIFIC GOALS
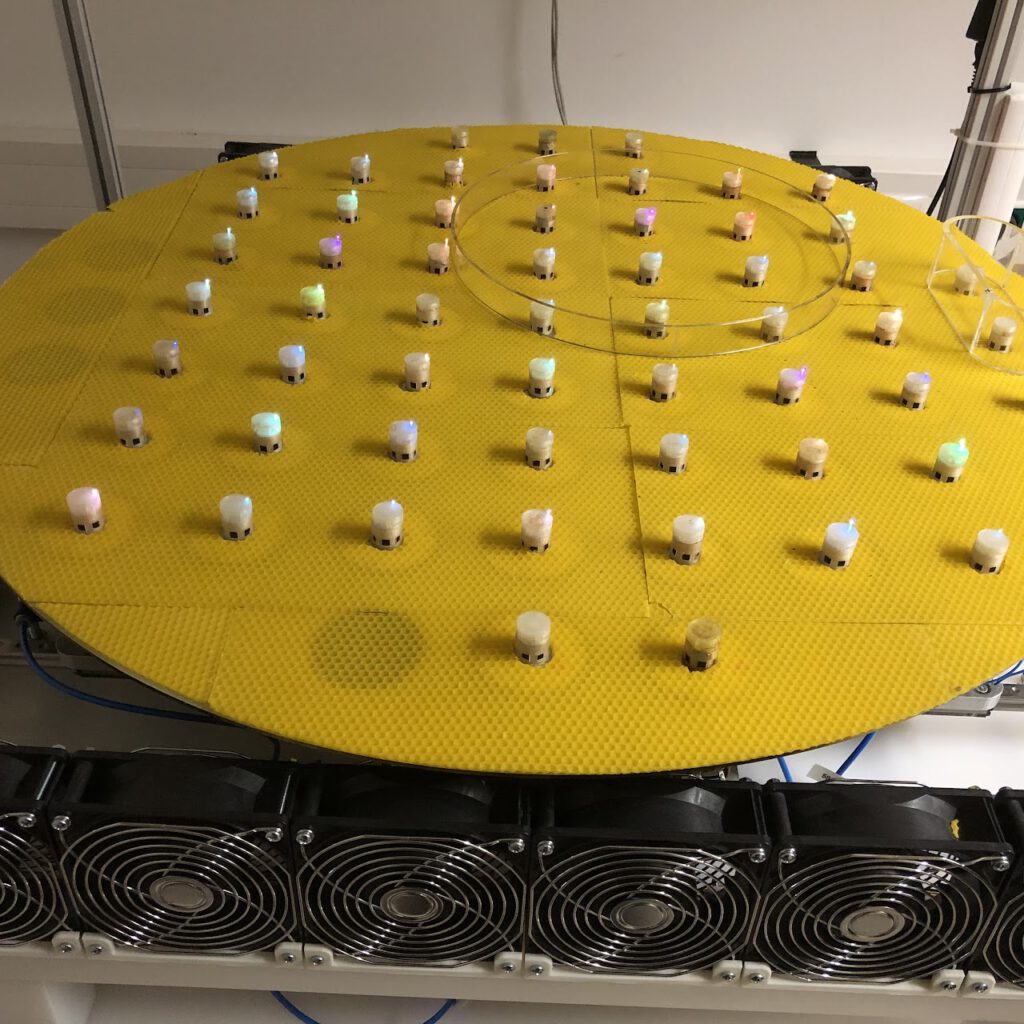
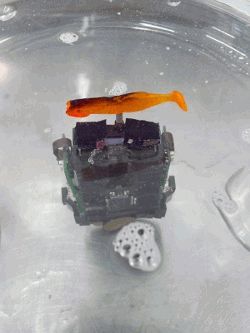
1. Develop robots that can influence the collective behaviours of animals (bees and fish).
2. Establishing an adaptive and self-organising society build by robots and animals.
3. Enable the robots to autonomously „learn“ the social language of the animals.
4. Establish mixed societies that pursue a common goal which can be defined by human ,users‘ of the system.
5. Allow the robots to gain novel skills by incorporating the capabilities of the animals (sensors, cognition).
Project partners:
- Univ. Graz (AT): Coordination & bee experiments
- Univ. Zagreb (HR): Honeybee robots
- Univ. Paris-Diderot (FR): Fish experiments
- EPFL (CH): Fish robots
- Univ. Lisboa (P): Modelling & simulation
- Cybertronica Research (D): Swarm robots & modelling
The project is funded by European Commission under the programme Future and Emerging Technologies
EU-FP7 Project no. 601074. Objective ICT-2011.9.10: Fundamentals of Collective Adaptive Systems – FOCAS